Go2 조종기/앱 사용법
✅Go2 앱 다운로드/Tutorial 영상/매뉴얼 링크
1️⃣로봇 부팅
(0:37)부터 확인하세요!
[ON] 로봇 일으키는 방법
-
로봇 자세 준비
로봇의 네 다리와 몸통이 바닥에 모두 닿도록 눕혀주세요.
(잘못된 자세일 경우 Go2가 정상적으로 일어서지 못하고 오작동할 수 있습니다.) -
배터리 장착
⚡ 표시가 위로 향하도록 넣습니다.
⚠️ 약간의 힘을 주고 밀어 넣어주세요! -
전원 ON
- 로봇: 버튼 짧게 1회, 길게 1회(약 3초)
- 조종기: 버튼 짧게 1회, 길게 1회(약 3초)
- 부팅이 완료되면 로봇이 자동으로 일어납니다.
2️⃣조종기
조종기 기능
[OFF] 로봇 끄는 방법
-
Stand Lock: L2+A
: 로봇의 다리 관절이 고정됩니다.
-
Low Down: L2+A
: 로봇이 바닥에 엎드리는 자세로 눕습니다.
-
로봇 전원 OFF (버튼 짧게 1번, 길게 1번 - 3초 정도 누릅니다.)
- 배터리를 꺼냅니다.
🚨비상 정지🚨
Damping Mode(Emergency Stop): L2+B
로봇이 초기 자세를 잘못 잡아 비틀거리거나, 조작 실수로 위험한 상황이 발생할 경우 비상 정지 버튼을 눌러 관절의 힘을 해제합니다.
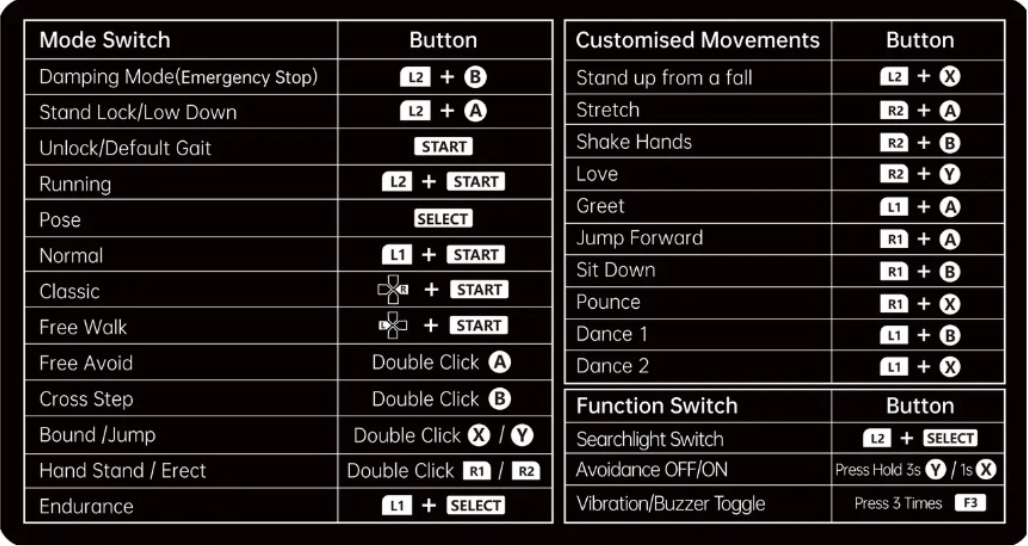
자세 전환
| 모드 | 조작 | 자세 |
|---|---|---|
| Pose | SELECT | 서기 (모드 1🔹) |
| Unlock/Default Gait | START | 관절 잠금 해제 → 이동 (모드 2🔸) |
| Running | L2 + START | 달리기 모드 진입 (해제하려면, START 버튼 다시 누르기) |
| Stand Lock/Low Down | L2+A | 관절 잠금 → 한 번 더 누르면 엎드리기 → 한 번 더 누르면 서는 자세로 복원 |
| Cross Step | Double Click B | 다리를 교차하며 걷기 |
| Bound | Double Click X | 껑충껑충 뛰기 |
| Jump | Doble Click Y | 연속 점프로 앞으로 이동 |
| Hand Stand | Double Click R1 | 물구나무 서기 |
| Erect | Double Click R2 | 두 발로 걷기 |
스틱 조작
| 스틱 | 조작 | 설명 |
|---|---|---|
| 왼쪽 | 앞뒤 | 앞뒤로 이동 (모드 2🔸) / 엎드리기 (모드 1🔹) |
| 왼쪽 | 좌우 | 좌우로 이동 (모드 2🔸) / 몸 비틀기 (모드 1🔹) |
| 오른쪽 | 앞뒤 | 머리 위로, 아래로 (모드 2🔸) / 피치 조절 (모드 1🔹) |
| 오른쪽 | 좌우 | 좌우로 회전 (모드 2🔸) / 고개 흔들기 (모드 1🔹) |
모션 동작
| 모션 | 조작 | 설명 |
|---|---|---|
| Stand up from a fall | L2+X | 로봇이 전도된 경우 일으키기 |
| Stretch | R2+A | 스트레칭 동작 |
| Shake Hands | R2+B | 손인사 (앞 우측 다리 올림) |
| Love | R2+Y | 뒷다리로 앉아 앞다리로 하트 모양 그리기 |
| Greet | L1+A | 두 발로 서서 인사 |
| Jump Forward | R1+A | 약 1m 앞으로 점프 |
| Sit Down | R1+B | 뒷다리로 앉기 |
| Pounce | R1+X | ⚠️ 앞으로 뛰며 펀치 동작 |
| Dance 1 | L1+B | 짧은 시간의 지정 동작 댄스 |
| Dance 2 | L1+X | 긴 시간의 지정 동작 댄스 |
기능 전환
| 모드 | 조작 | 설명 |
|---|---|---|
| Searchlight Switch | L2 + SELECT | 탐조등 켜기/끄기 |
| Avoidance OFF | Y 3초 누르기 | 장애물 회피 모드 끄기 |
| Avoidance ON | X 1초 누르기 | 장애물 회피 모드 켜기 |
| Vibration/Buzzer Toggle | F3키 3번 누르기 | 조종기 진동/소리 전환 |
Go2 조종기 바인딩
새로운 조종기로 교체하시는 경우, 로봇과 조종기 간 바인딩이 필요합니다.
Accompanying 모드🐕
로봇개와 산책
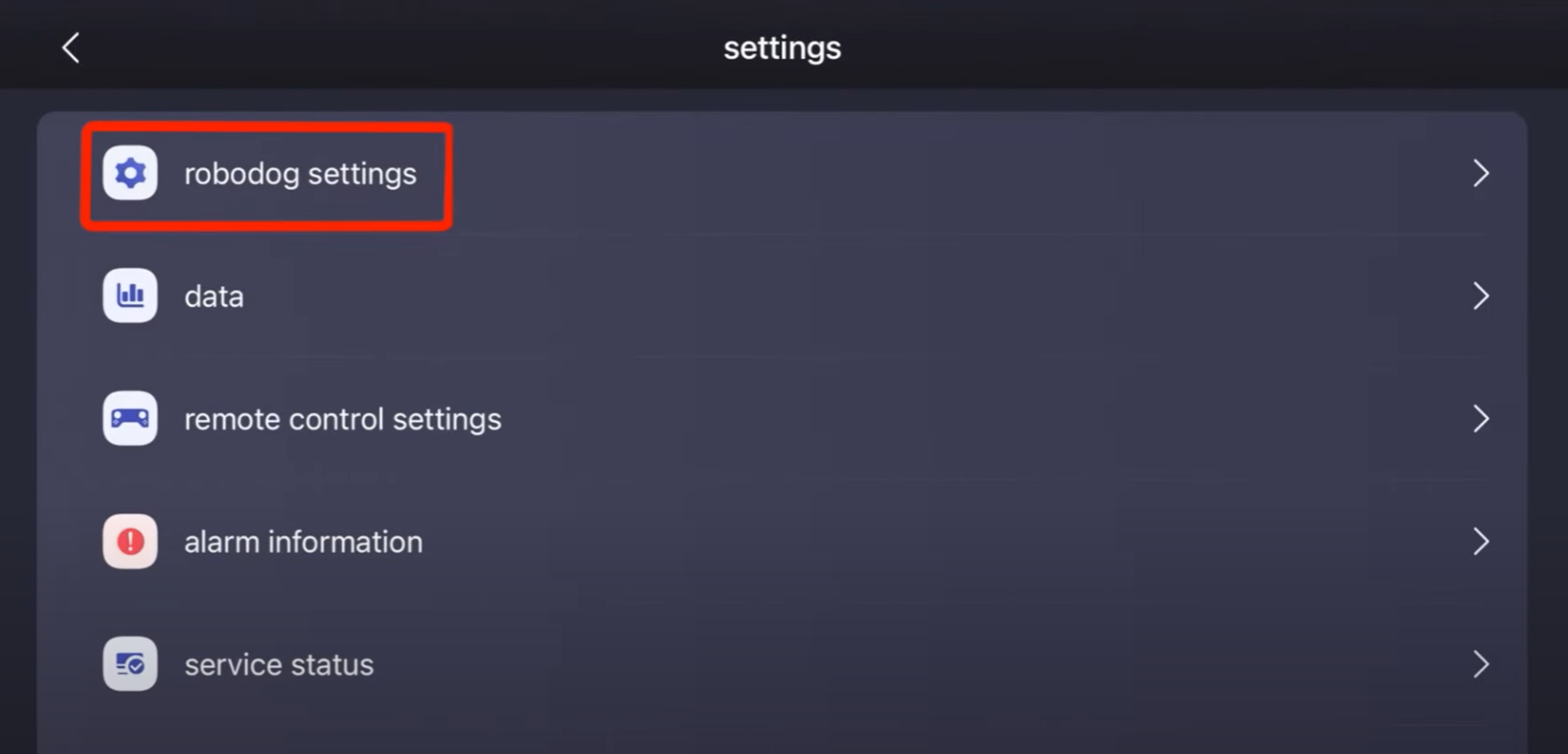
3️⃣앱 기능
앱-로봇 연결
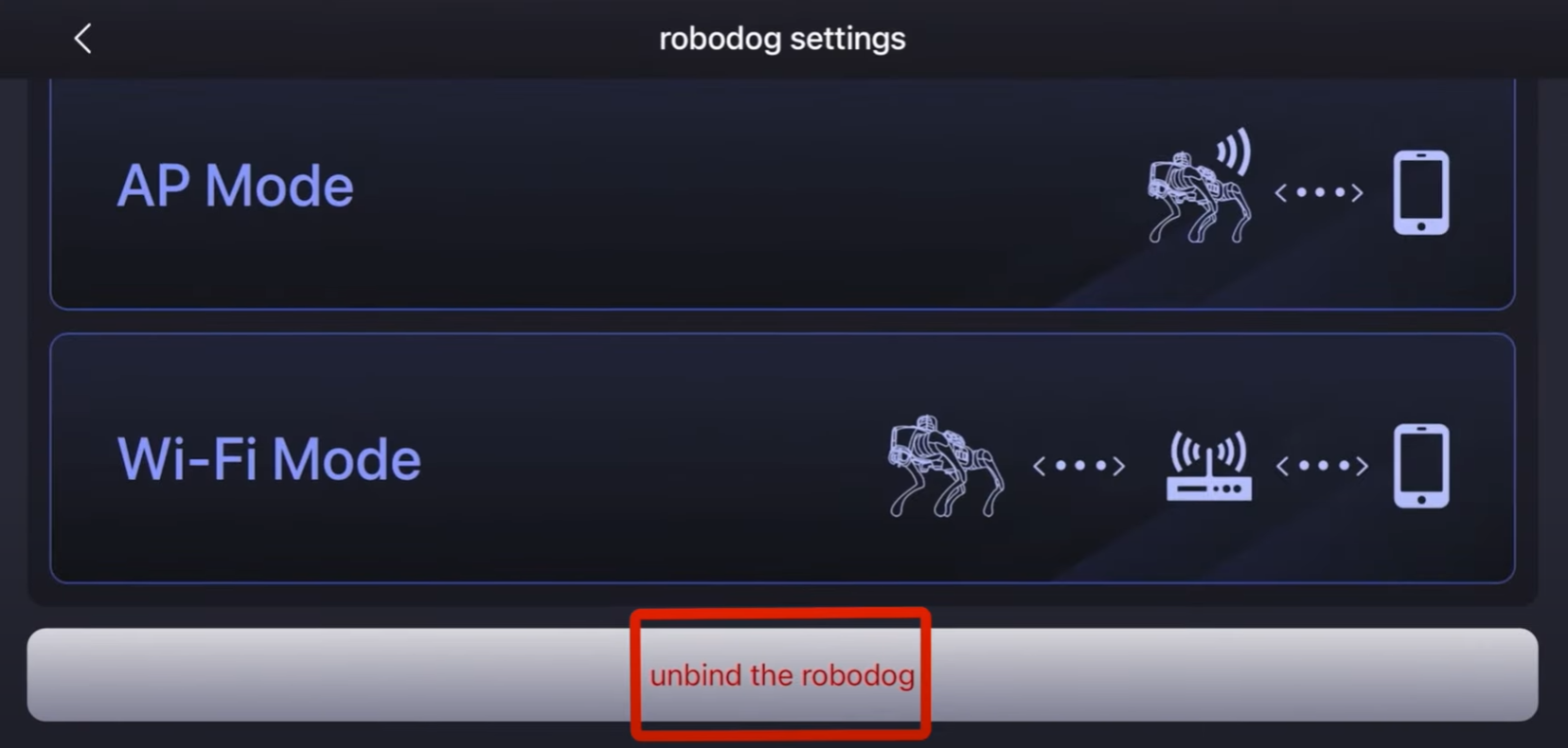
먼저 블루투스를 활성화하여, 주변에 있는 로봇개 모델을 인식합니다. 원하는 이름을 설정해주시면 됩니다. 접속하는 방법은 두 가지가 있습니다.
- AP mode: 스마트폰을 로봇개의 핫스팟에 연결합니다. 반드시, 데이터를 끈 상태여야 합니다. wifi 설정으로 들어가서 이름을 찾습니다.
- Wi-Fi mode: 공유기를 통해 로봇개를 연결합니다. 현재 스마트폰에 접속된 wifi로 접속해야 하며, 해당 wifi의 비밀번호를 입력해주세요.
⚠️ 펌웨어 업데이트 및 Function 기능은 반드시 Wi-Fi 모드에서만 사용 가능합니다
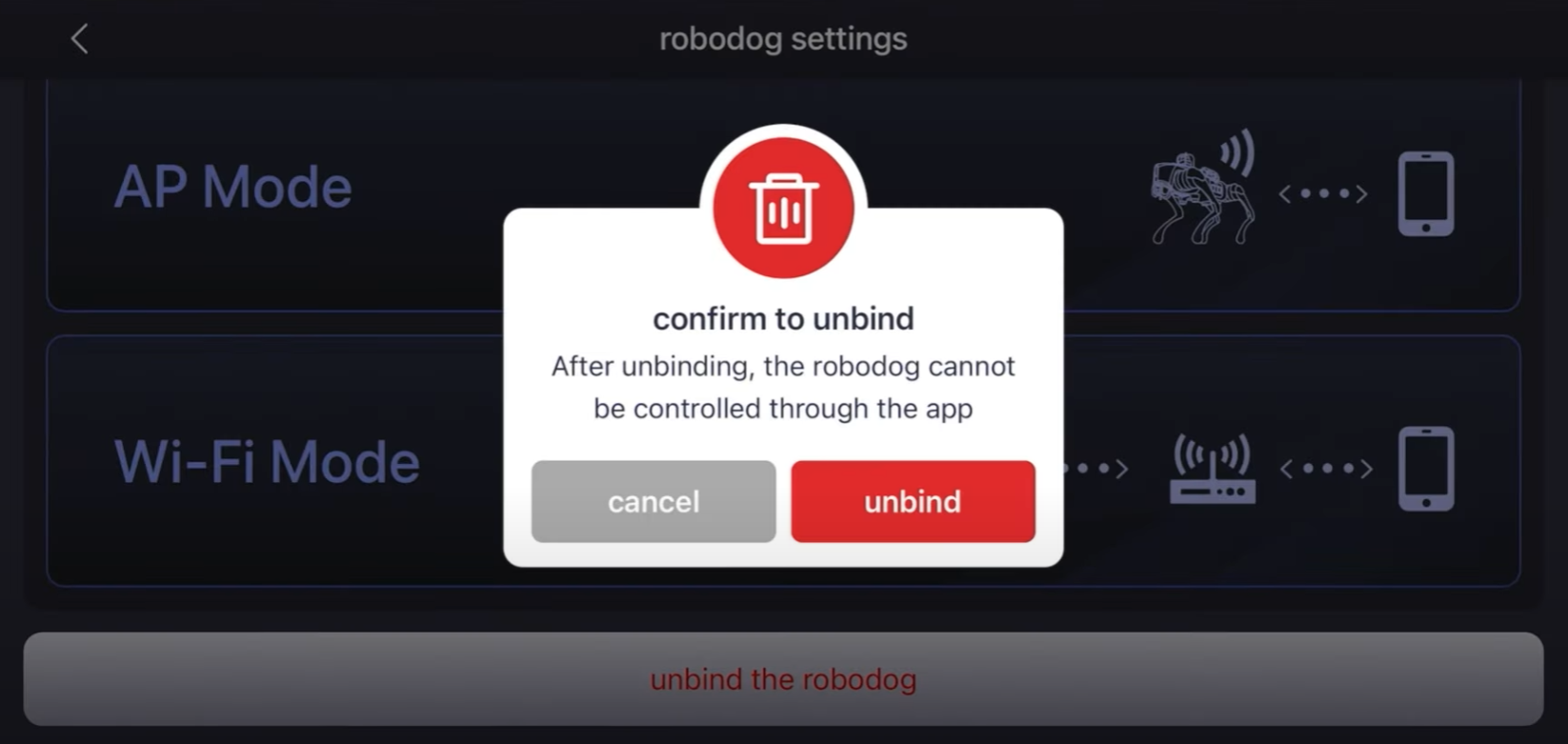
언바인드 방법
로봇은 1대의 스마트폰과만 연동됩니다. 다른 스마트폰에서 사용하려면 기존 연결을 먼저 언바인드해야 합니다.
펌웨어 업데이트 방법
- 로봇 배터리를 충분히 충전해주세요.
- 앱에서 Go2에 Wi-Fi 모드로 연결합니다.
-
아래 두 가지 방법 중 선택
- 방법 1: “Go!” 버튼을 누르면, “New Firmware”라는 메시지와 함께 업데이트 팝업이 나타납니다.
-
방법 2: “Device-Update” 설정으로 들어가 업데이트를 진행할 수 있습니다.
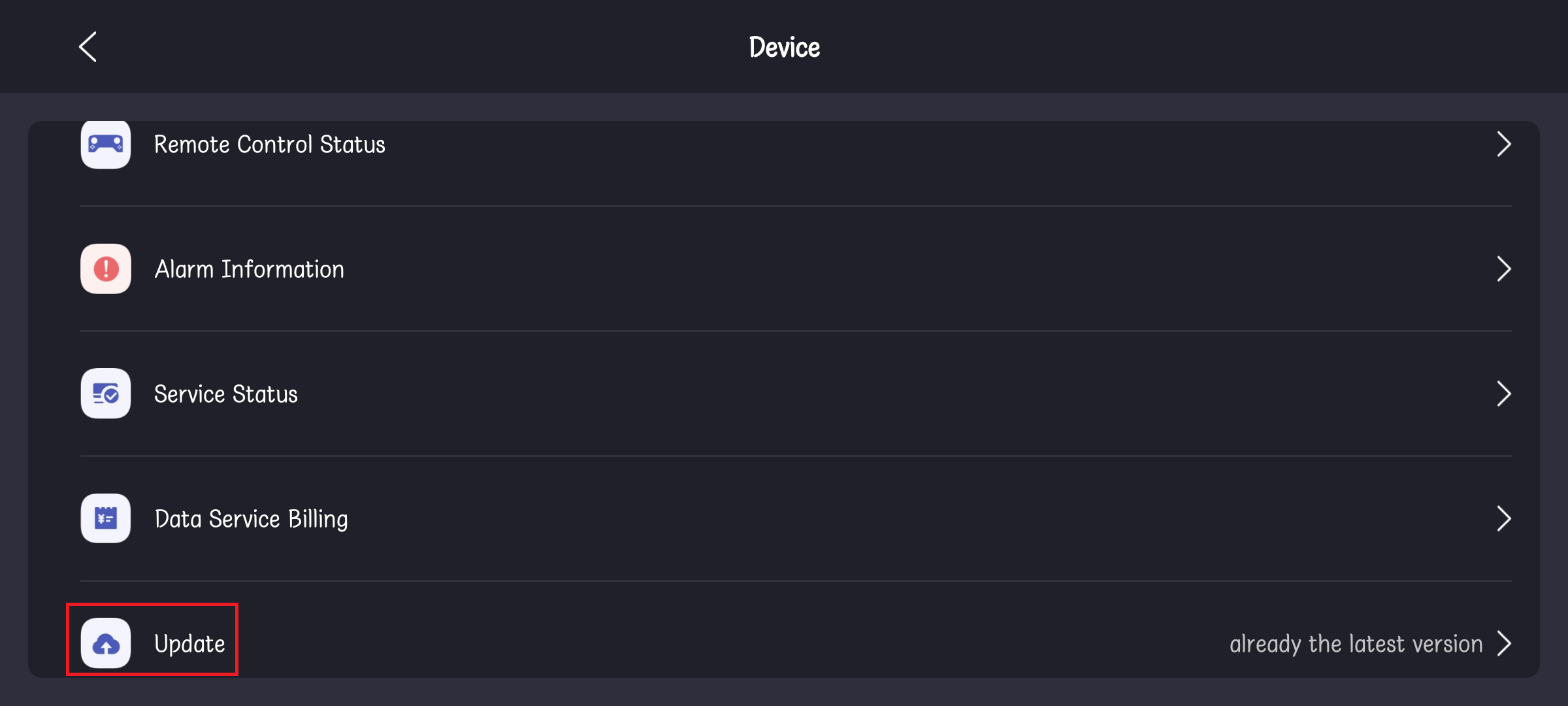
-
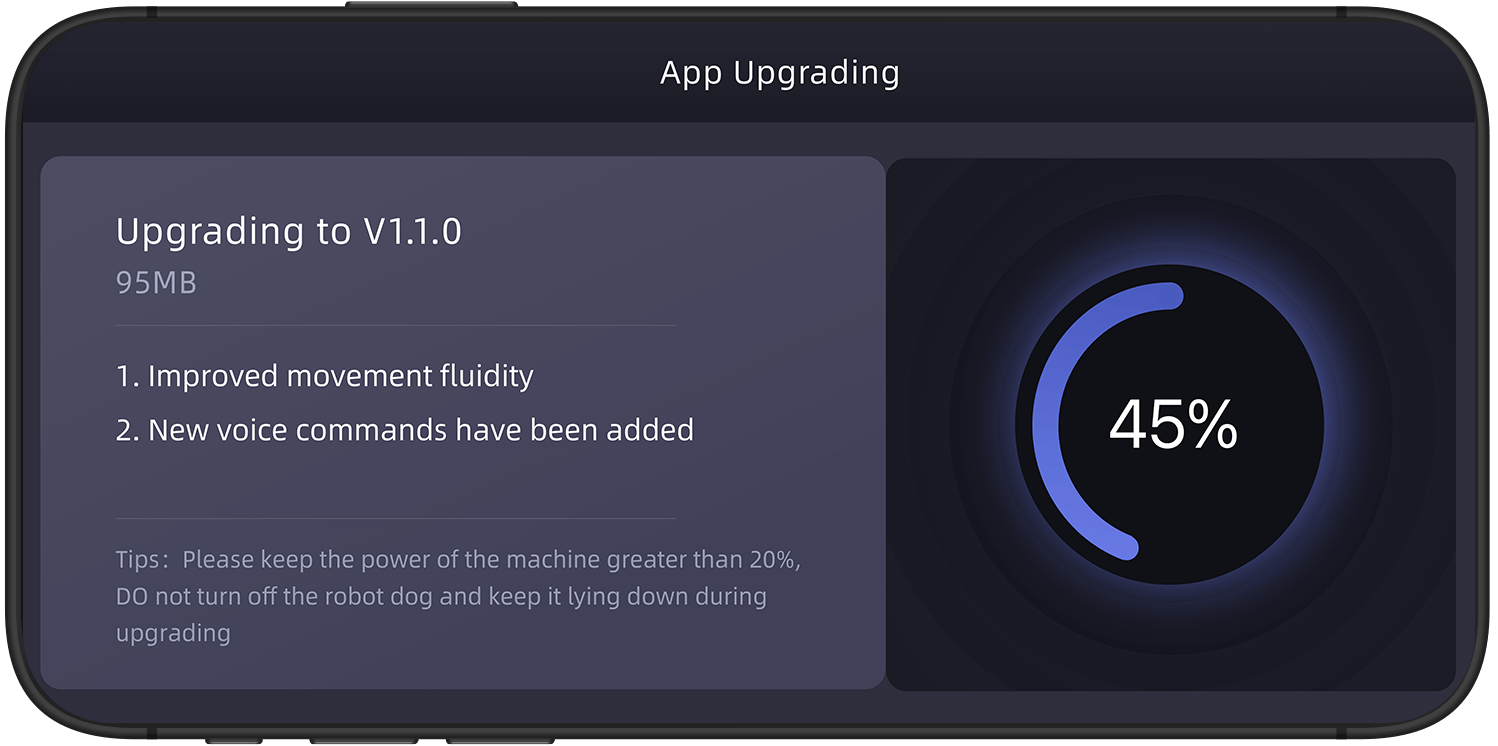
업데이트
: 업데이트 되는 내용은 좌측 설명에서 확인하실 수 있습니다.
Audio Player
미리 녹음한 문장을 스피커로 내보낼 수 있습니다.
음성인식
- “Function-BenBen”으로 들어갑니다.
-
GPT처럼 로봇과 대화할 수 있으며, 간단 명령이 가능합니다.
🚨주의! 영어, 중국어만 지원합니다.
ex) 명령 예시: "Take one step forward"
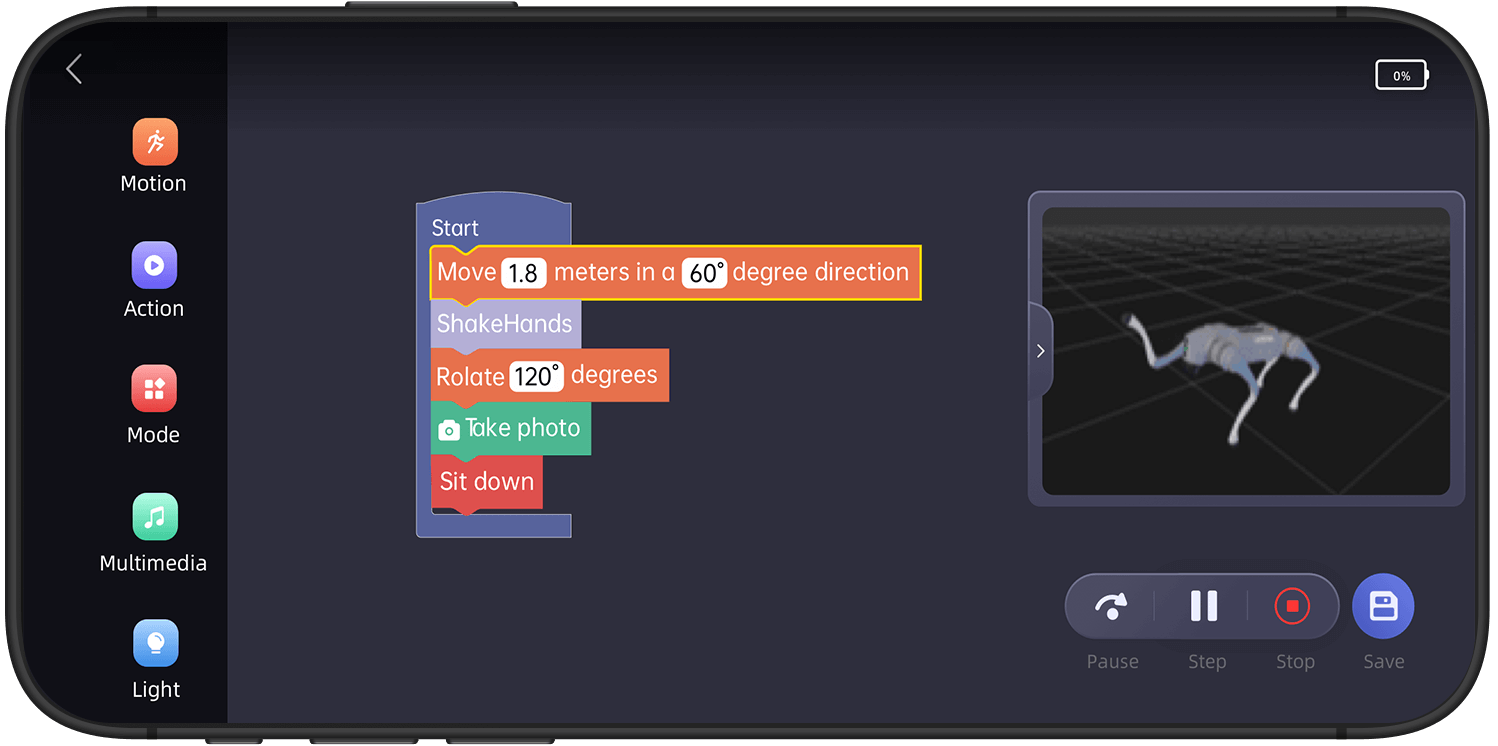
블록코딩
Mapping & Navigation
기본 장착된 L1 LiDAR로 간단하게 매핑 및 내비게이션이 가능합니다. 주변환경을 스캔한 후, 사용자가 지정한 위치대로 정해진 시간동안 계속 반복합니다.
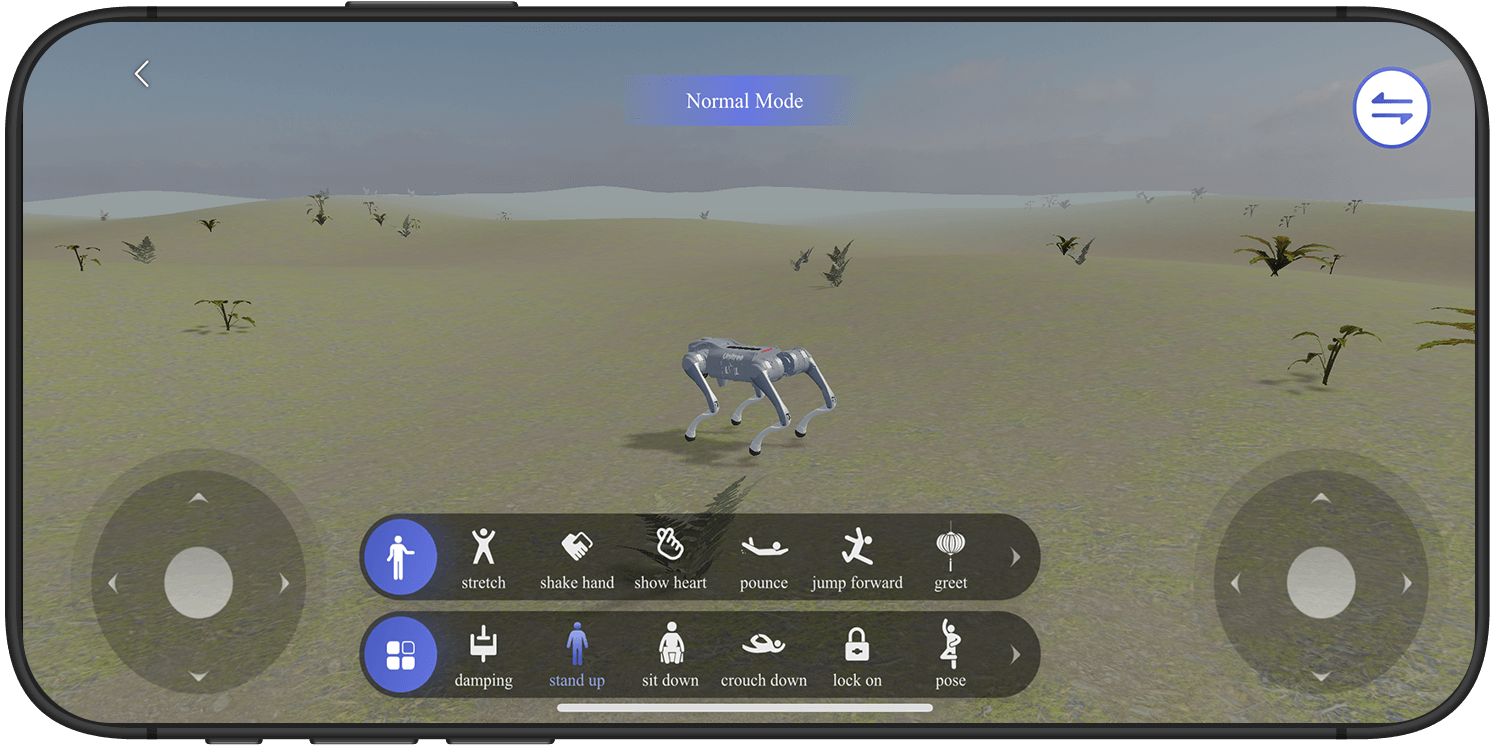
Simulation
Lively Pet
Calibration
로봇의 걸음이 이상하거나 모터가 오작동할 경우, 앱 안내에 따라 Calibration을 진행합니다.